在本文中记录我们以 MicroPython 和 REPL 的交互为例,探索 MicroPython 为什么能和一个 OS 一样做到被事件驱动,而非顺序执行。
现象
在 esp32 上执行如下代码
1 2 3 4 import webrepl webrepl.start() while True: print("loop" )
后,使用 webrepl 客户端进行连接,无法在板上 serial port 和 webrepl console 中看到任何相关内容
在执行完 webrepl.start() 后,没有开始循环时,使用 webrepl 客户端进行连接,连接成功后,再开始循环,loop 会输出到 serial port 和 webrepl console 中
如果执行的是这样的代码
1 2 3 4 5 6 import webrepl import time webrepl.start() while True: print("loop" ) time.sleep_ms(1000 )
则即使在循环开始以后,也能够通过 webrepl 连接上
在循环开始后,使用 serial 连接的终端模拟器可以直接通过 Ctrl + C 而 webrepl console 中就无法做到
在加入了 time.sleep_ms(1000) 的代码被加入后,在 webrepl 中也能够使用 Ctrl + C 来将循环打断
一些前期猜想
MicroPython 是直接跑在 MicroPython 上的,通过中断进行一切事件驱动(无法解释死循环中无法响应 webrepl 请求)
MicroPython 是跑在 RTOS 上的,通过 RTOS 的线程级调度来实现并发,这样也能够做到事件驱动(还是无法解释死循环中无法响应 webrepl 请求)
MicroPython 是个单线程程序,直接由自身通过轮询去处理所有的事件(这样的确可以在要输出的时候去查看所有连接上的 console,但是能输出不能接收又显得太过古怪,至少在输出的时候可以通过查看所有事件来发现要接收的信号)
到这里我们已经觉得把 MicroPython 当成黑箱去分析得出的结果可能非常不靠谱,所以我们从源码入手,尝试解释我们实验中遇到的现象。
实际实现 我们烧录进去的二进制文件包括了 RTOS 和 MicroPython,它们一共使用三种方式来实现事件驱动:
通过设置片上中断来进行中断响应,达到打断程序的目的。这样可以非常自由地进行操作,例如收到了 uart 的输入后,可以直接将这些输入送给 MicroPython 的 stream。这里的响应是最底层的。在这一层,MCU 和我们使用的计算机十分相似,我们完全可以用理解 PC 中断的方式来理解 esp32 的中断。
在 MicroPython 最先开始在 FreeRTOS 上运行的时候,进行了一些初始化操作,其中进行了中断设置。我们发现
1 2 3 4 5 6 7 8 void app_main (void ) { MICROPY_BOARD_STARTUP(); xTaskCreatePinnedToCore(mp_task, "mp_task" , MP_TASK_STACK_SIZE / sizeof (StackType_t), NULL , MP_TASK_PRIORITY, &mp_main_task_handle, MP_TASK_COREID); }
函数启动了主线程函数 mp_task,在其开始运行的时候
1 2 3 4 5 6 7 8 9 10 11 12 13 14 void mp_task (void *pvParameter) { volatile uint32_t sp = (uint32_t )get_sp(); #if MICROPY_PY_THREAD mp_thread_init(pxTaskGetStackStart(NULL ), MP_TASK_STACK_SIZE / sizeof (uintptr_t )); #endif #if CONFIG_USB_ENABLED usb_init(); #elif CONFIG_ESP_CONSOLE_USB_SERIAL_JTAG usb_serial_jtag_init(); #else uart_stdout_init(); #endif machine_init(); ...
进行了这些初始化操作,而通过串口输出的 loop 会因为 Ctrl + C 而停止,键盘输入没有因为死循环而被禁用,就是因为这里调用 uart_stdout_init 进行了初始化
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 void uart_stdout_init (void ) { uart_config_t uartcfg = { .baud_rate = MICROPY_HW_UART_REPL_BAUD, .data_bits = UART_DATA_8_BITS, .parity = UART_PARITY_DISABLE, .stop_bits = UART_STOP_BITS_1, .flow_ctrl = UART_HW_FLOWCTRL_DISABLE, .rx_flow_ctrl_thresh = 0 }; uart_param_config(MICROPY_HW_UART_REPL, &uartcfg); const uint32_t rxbuf = 129 ; const uint32_t txbuf = 0 ; uart_driver_install(MICROPY_HW_UART_REPL, rxbuf, txbuf, 0 , NULL , 0 ); uart_isr_handle_t handle; uart_isr_free(MICROPY_HW_UART_REPL); uart_isr_register(MICROPY_HW_UART_REPL, uart_irq_handler, NULL , ESP_INTR_FLAG_LOWMED | ESP_INTR_FLAG_IRAM, &handle); uart_enable_rx_intr(MICROPY_HW_UART_REPL); }
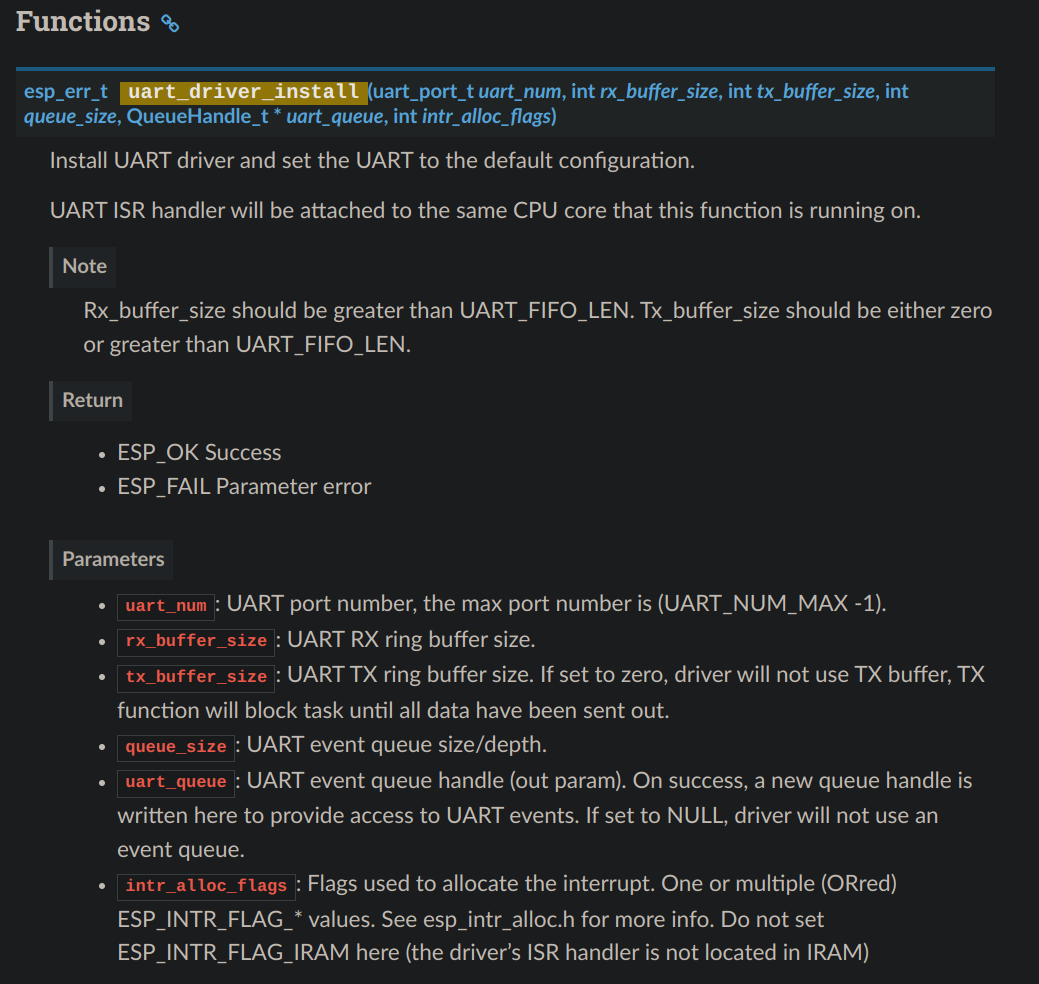
而这其中的函数 uart_driver_install 是一个 esp-idf 库函数,我们可以在官方文档中找到它的功能
这个函数将对应的中断响应程序 install 到内存的某个部分来等待中断。
RTOS 进行线程级调度 此外,MicroPython 本身并不是一个单线程的程序,它也会通过 FreeROTS 的线程来执行自己的函数。比如在上面提到的,在一个没有 delay 的循环中,输出的内容仍然会被送到 webrepl 客户端,这是通过在 FreeRTOS 上 spawn 出来的线程来发送的。
1 2 3 4 5 6 7 8 9 STATIC mp_obj_t ppp_connect_py (size_t n_args, const mp_obj_t *args, mp_map_t *kw_args) { enum { ... if (xTaskCreatePinnedToCore(pppos_client_task, "ppp" , 2048 , self, 1 , (TaskHandle_t *)&self->client_task_handle, MP_TASK_COREID) != pdPASS) { mp_raise_msg(&mp_type_RuntimeError, MP_ERROR_TEXT("failed to create worker task" )); } return mp_const_none; }
在这里 spawn 出了一个线程,执行的是 pppos_client_task ,这个 task
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 static void pppos_client_task (void *self_in) { ppp_if_obj_t *self = (ppp_if_obj_t *)self_in; uint8_t buf[256 ]; while (ulTaskNotifyTake(pdTRUE, 0 ) == 0 ) { int err; int len = mp_stream_rw(self->stream, buf, sizeof (buf), &err, 0 ); if (len > 0 ) { pppos_input_tcpip(self->pcb, (u8_t *)buf, len); } } self->client_task_handle = NULL ; vTaskDelete(NULL ); }
的功能就是不断从 MicroPython 的 I/O stream 中取东西,交由 PPP 来进行处理。由于是另一个线程,会被 FreeRTOS 调度出来,也就不会被 MicroPython 主线程上的循环给 block 住了。
MicroPython 进行事件响应 那么为什么对 webrepl server 的连接请求又会被 block 呢?MicroPython 内部还有一套原生的 Event 系统,这些 events 会在特定的时候被放到 MicroPython 的 foreground 来运行。还是以 webrepl 为例,等待 webrepl client 的连接请求显然是被放到了 background 中的,而无法在没有 sleep 的循环中直接被响应又告诉我们这并不在另一个线程上运行,也并非中断。
MicroPython 本身维护了一个链表,记录着那些需要被处理的回调函数
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 def setup_conn (port, accept_handler ): global listen_s listen_s = socket.socket() listen_s.setsockopt(socket.SOL_SOCKET, socket.SO_REUSEADDR, 1 ) ai = socket.getaddrinfo("0.0.0.0" , port) addr = ai[0 ][4 ] listen_s.bind(addr) listen_s.listen(1 ) if accept_handler: listen_s.setsockopt(socket.SOL_SOCKET, 20 , accept_handler) for i in (network.AP_IF, network.STA_IF): iface = network.WLAN(i) if iface.active(): print ("WebREPL daemon started on ws://%s:%d" % (iface.ifconfig()[0 ], port)) return listen_s
这段 Python 代码调用了一个用 C 语言编写的函数
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 STATIC mp_obj_t socket_setsockopt (size_t n_args, const mp_obj_t *args) { ... #if MICROPY_PY_USOCKET_EVENTS case 20 : { if (args[3 ] == mp_const_none) { if (self->events_callback != MP_OBJ_NULL) { usocket_events_remove(self); self->events_callback = MP_OBJ_NULL; } } else { if (self->events_callback == MP_OBJ_NULL) { usocket_events_add(self); } self->events_callback = args[3 ]; } break ; } #endif ... return mp_const_none; }
这里将自己这个 socket 对象添加到 events 链表中,调用的是函数 usocket_events_add.
1 2 3 4 STATIC void usocket_events_add (socket_obj_t *sock) { sock->events_next = usocket_events_head; usocket_events_head = sock; }
将事件添加到链表头。而处理这些回调函数(事件)的,是在主线程中主动调用的函数,使用了类似轮询的方式,不断查看有没有需要处理的事件。比如处理 usocket 事件的
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 void usocket_events_handler (void ) { if (usocket_events_head == NULL ) { return ; } if (--usocket_events_divisor) { return ; } usocket_events_divisor = USOCKET_EVENTS_DIVISOR; fd_set rfds; FD_ZERO(&rfds); int max_fd = 0 ; for (socket_obj_t *s = usocket_events_head; s != NULL ; s = s->events_next) { FD_SET(s->fd, &rfds); max_fd = MAX(max_fd, s->fd); } struct timeval timeout =0 , .tv_usec = 0 }; int r = select(max_fd + 1 , &rfds, NULL , NULL , &timeout); if (r <= 0 ) { return ; } for (socket_obj_t *s = usocket_events_head; s != NULL ; s = s->events_next) { if (FD_ISSET(s->fd, &rfds)) { mp_call_function_1_protected(s->events_callback, s); } } }
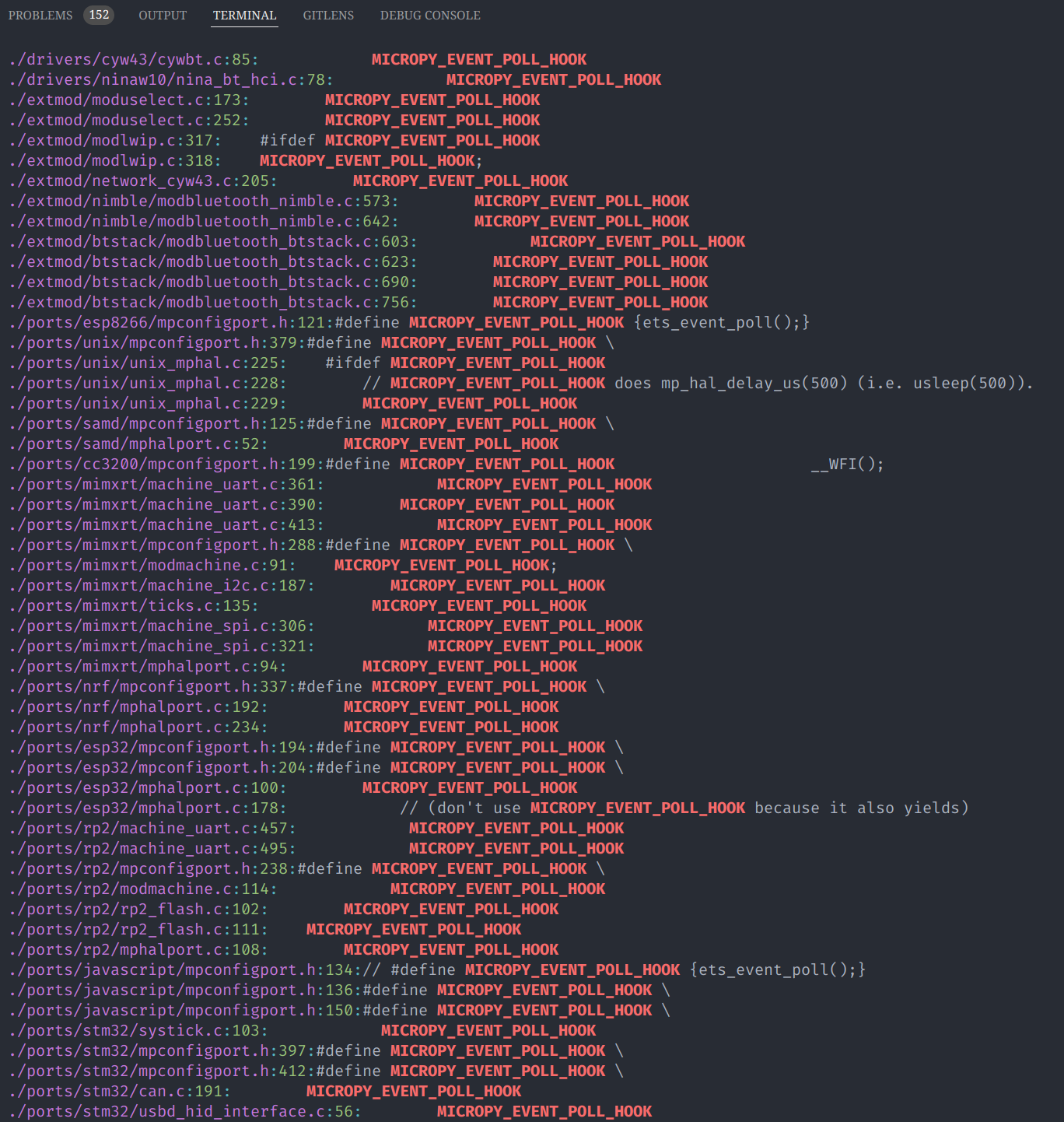
就在每次被调用到的时候取处理我们添加到链表中的 events. 而在很多函数中,我们都能够找到这个函数以宏的形式得到了调用
1 2 3 4 5 6 7 8 9 #define MICROPY_EVENT_POLL_HOOK \ do { \ extern void mp_handle_pending(bool); \ mp_handle_pending(true); \ MICROPY_PY_USOCKET_EVENTS_HANDLER \ MP_THREAD_GIL_EXIT(); \ ulTaskNotifyTake(pdFALSE, 1); \ MP_THREAD_GIL_ENTER(); \ } while (0);
在这些地方,都会检查是否有还未被处理的 event,然后直接由主线程进行处理。较为典型的,有在 repl 获取命令时的 mp_task() --> pyexec_friendly_repo() --> readline() --> mp_hal_stdin_rx_chr() 中,就使用了这个宏
1 2 3 4 5 6 7 8 9 int mp_hal_stdin_rx_chr (void ) { for (;;) { int c = ringbuf_get(&stdin_ringbuf); if (c != -1 ) { return c; } MICROPY_EVENT_POLL_HOOK } }
我们在来看 time.sleep_ms 的实现
1 2 3 4 5 6 7 STATIC mp_obj_t time_sleep_ms (mp_obj_t arg) { mp_int_t ms = mp_obj_get_int(arg); if (ms >= 0 ) { mp_hal_delay_ms(ms); } return mp_const_none; }
而这里调用的 mp_hal_delay_ms 中,又有查询 socket 中事件的宏
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 void mp_hal_delay_ms (uint32_t ms) { uint64_t us = ms * 1000 ; uint64_t dt; uint64_t t0 = esp_timer_get_time(); for (;;) { mp_handle_pending(true ); MICROPY_PY_USOCKET_EVENTS_HANDLER MP_THREAD_GIL_EXIT () ; uint64_t t1 = esp_timer_get_time(); dt = t1 - t0; if (dt + portTICK_PERIOD_MS * 1000 >= us) { taskYIELD(); MP_THREAD_GIL_ENTER(); t1 = esp_timer_get_time(); dt = t1 - t0; break ; } else { ulTaskNotifyTake(pdFALSE, 1 ); MP_THREAD_GIL_ENTER(); } } if (dt < us) { mp_hal_delay_us(us - dt); } }
所以我们在进行 time.sleep_ms 的时候,也能够响应 socket 的事件。
综上,MicroPython 用三种不同的机制来实现了类似事件驱动的效果。感觉这样做似乎并不太 elegant,但可能出于性能考虑选取的最优解,三种方式的开销也确实一种比一种小。本次阅读 MicroPython 源码使我们获益良多。(虽然他们把 initializer 拼成 initialiser)
boot.py, main.py 的运行 运行这两个文件的代码也在 mp_task 中
1 2 3 4 5 6 7 8 9 10 11 12 13 14 void mp_task (void *pvParameter) { ... pyexec_frozen_module("_boot.py" ); pyexec_file_if_exists("boot.py" ); if (pyexec_mode_kind == PYEXEC_MODE_FRIENDLY_REPL) { int ret = pyexec_file_if_exists("main.py" ); if (ret & PYEXEC_FORCED_EXIT) { goto soft_reset_exit; } } ... goto soft_reset; }
最后这个文件中读出来的内容都去调了这个函数
1 2 3 int pyexec_file (const char *filename) { return parse_compile_execute(filename, MP_PARSE_FILE_INPUT, EXEC_FLAG_SOURCE_IS_FILENAME); }
和 REPL 中我们的输入共用一个函数,只是改变了一个参数,这个参数仅带来 parse 的不同
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 mp_parse_tree_t mp_parse (mp_lexer_t *lex, mp_parse_input_kind_t input_kind) { ... size_t top_level_rule; switch (input_kind) { case MP_PARSE_SINGLE_INPUT: top_level_rule = RULE_single_input; break ; case MP_PARSE_EVAL_INPUT: top_level_rule = RULE_eval_input; break ; default : top_level_rule = RULE_file_input; } push_rule(&parser, lex->tok_line, top_level_rule, 0 ); ...
运行这两个文件的方式不过是读出来然后直接解释执行。